2026世界杯赛事竞猜中国官网 LeCun 10亿押注的标的,全球最初视觉大模子团队早已布局
听雨 发自 凹非寺
量子位 | 公众号 QbitAI
Yann LeCun押注的寰球模子阶梯,一匹深圳黑马也已提前落子。
他们是视启过去,作念出全球第一视觉大模子——Grounding DINO、DINO-X——的那支团队。
他们并不餍足于「看见寰球」,而是正起劲把AI进一步推向「猜想过去」的才略规模。

当今,他们押注的是隐空间寰球模子。
要知谈,LeCun为了这条期间阶梯,离开Meta、创办AMI Labs,完成10.3亿好意思元融资,创下欧洲史上最大种子轮记录。
不同于主流寰球模子瞻望下一帧画面长什么样,隐空间寰球模子条目AI在更详尽的表征空间里,学习动作和寰球景色变化之间的因果规章。
5月15日,在2026全球东谈主工智能终局展暨第七届深圳国际东谈主工智能博览会举办的「AGI前夕:大模子的醒悟时刻」论坛上,视启过去创举东谈主见磊,更是在主题演讲中直言:
作念寰球模子很难,作念隐空间寰球模子更难,但咱们会知难而上。

隐空间寰球模子为什么是更难的那条路?难在那儿?
作念出来又意味着什么?
「隐空间寰球模子很难,但咱们一定要作念」
跟着东谈主工智能加快从数字寰球走向物理寰球,智能体濒临的中枢任务依然变了。
不仅要「看见」,并且要「猜想」——归拢因果关系,把抓时空动态,在寥落反馈与复杂拘谨下完成研究、决策与学习。
强化学习提供了从交互训导中学习的基本范式。看大讲话模子这边,从ChatGPT应用强化学习,到o系列模子以及coding才略的残害,实践上都是一系列强化学习算法应用的残害。
但物理寰球的样本效用低、安全拘谨严、交互本钱高、环境不可重置,单纯依赖在线试错的规律,难以膨胀到果然场景。

△AI生成
张磊的判断是,实在的智能,不行只停留在「看到面前景色就输搬动作」的层面。
要是莫得对过去景色的猜想、对举止后果的预判,智能体就无法在物理寰球中继续伸开决策链条,也难以实在过问现实环境。
这正是寰球模子的道理场所:让AI从训导数据中学习动作、景色与收尾之间的因果关系,在举止前先「思象」下一步可能发生什么,为强化学习提供可膨胀的里面预演空间。
在张磊看来,面前各式寰球模子阶梯都在不同方朝上激动得很快。但关于机器东谈主和物千里着冒昧能而言,一个中枢挑战仍然存在:
模子学到的究竟是像素级关系性,如故可用于研究和适度的物理规章与因果关系?
模子在像素层面学习,很容易被纹理、光照、配景等细节过问,学习效用低下,不利于学习果然的因果关系和物理规章。
这正是LeCun说「在输入空间作念瞻望是灾祸的」的原因,亦然隐空间寰球模子的起点。

Latent表征的价值在于,它不错把高维、冗余的视觉输入压缩成更详尽的景色暗意,过滤掉大都与决策无关的像素细节,把学习要点放到更实践的变化规章上。
不错说,表征学习是寰球模子中最为中枢的问题。
换句话说,隐空间寰球模子不执着于「过去画面长什么样」,而更热心「寰球景色怎样演化」,因此更稳妥学习物理规章和因果关系。
但视启发现,现存的隐空间决策还差了要津的一步。
大多数latent表征天然脱离了像素,却并不实在「归拢物体」。
要是模子不知谈场景里哪些是寂然物体、物体之间是什么关系、哪些变化来自视角、哪些变化来自交互,那么它要胜仗在隐空间中学习物理规章,难度仍然尽头高。
原因很爽快:物理规章实践上并不作用在像素上,而是作用在物体、结构和关系上。
咱们这里也作念了张图,爽快寰球归拢:

△AI生成
张磊以为,latent表征必须具备归拢物体的才略,本领更好地学习物理规章。
视启的解法是把物体归拢才略引入latent表征学习中,通过2D感知、3D表征、分割和语义归拢,让latent表征具备「寰球由哪些物体组成、它们处于什么空间位置、具有什么语义属性」的基础贯通,再进一步学习动作驱动下的景色更正和物理演化。
通过引入物体归拢的结构信息,模子不错更高效地对数据进行压缩,从海量数据中学到内在的、更为实践的规章。
这么,模子学习的不再是黑盒式表征,而是一个更具对象性、空间性和物感性的结构化latent寰球。
因此,视启将我方的阶梯称为「视觉原生寰球模子」,这亦然他们和其他隐空间寰球模子的要津区分。
为了竣事实在可落地的物理寰球模子,张磊以为,这类模子需要同期具备三个中枢特征:
Object-Centric,以物体为中心。
表征不行停留在像素层面,要具备对物体的归拢才略,未必识别寰球由哪些对象组成、它们之间怎样交互。唯一这么,模子才有可能从海量数据中学习到更领路、更可泛化的物理规章,而不是停留在名义的视觉关系性上。
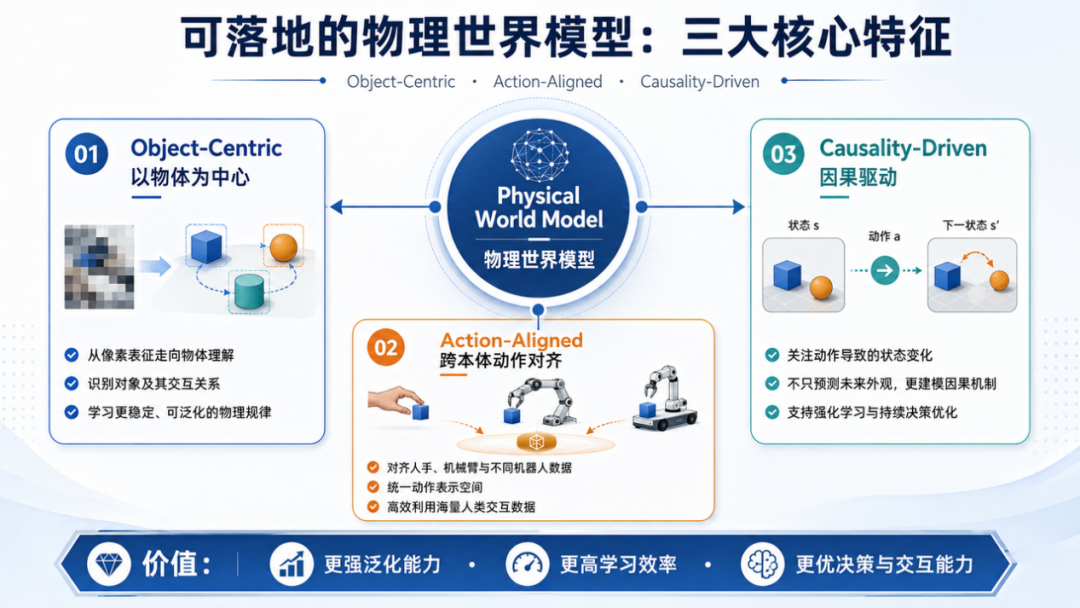
Action-Aligned,跨实践动作对都。
把东谈主手动作、机械臂操作以及不同机器东谈主实践的数据对都到归拢暗意空间,从而更高效地运用大都东谈主类交互数据,匡助机器东谈主更快学会怎样与环境互动。
Causality-Driven,因果驱动。
寰球模子要学的,是「推论某个动作之后,寰球景色将怎样变化」。唯一具备这种因果建模才略,寰球模子本领实在与强化学习诱惑,缓助机器东谈主在与环境继续交互中束缚提高决策、学习和泛化才略。
张磊说,视启对标的的判断永久正确,仅仅赛谈的吵杂进程,照实超出了当初的猜想。
不外,这反而印证了视启遵守隐空间阶梯的前瞻性——在悉数东谈主都往像素空间冲的时候,视启依然在更难、也雠校确的方朝上蕴蓄了先发上风。
从全球第一视觉大模子,到视觉原生寰球模子
张磊关于寰球模子的眼光,并非附耳射声。
背后是视启历久构建的以物体为中心的视觉归拢才略,亦然这支团队数年的蕴蓄。
视启过去,其中枢团队来自粤港澳大湾区数字经济商议院磋商机视觉与机器东谈主商议中心(IDEA CVR)孵化的DINO-X团队。
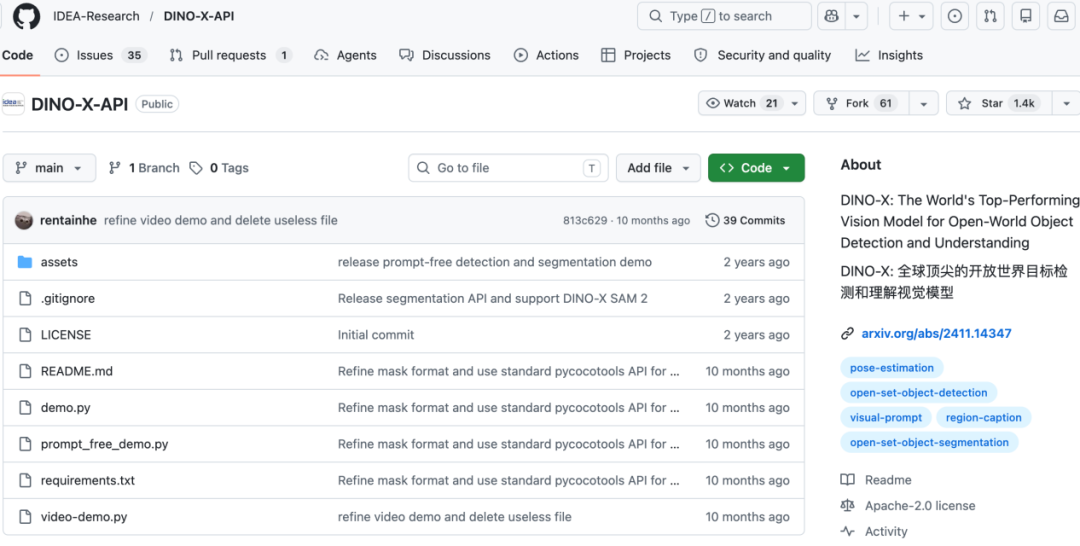
团队已畅达推出DINO、Grounding DINO、DINO-X等代表性责任,继续推动灵通寰球主义检测与物体级视觉归拢的发展。
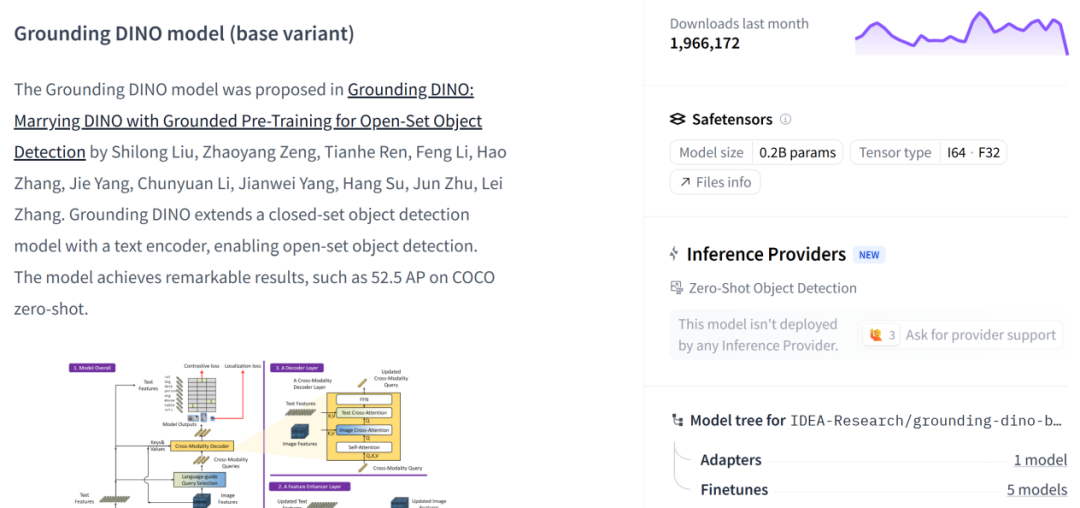
Grounding DINO已成为灵通集检测的紧迫里程碑之一,2026世界杯赛事竞猜官方版而DINO-X则是面向灵通寰球物体归拢的全球最初视觉大模子。
本年4月,谷歌DeepMind发表的Vision Banana论文中,也多处提到视启过去的DINO-X模子。
这篇论文的签字作家包括何恺明和谢赛宁,在SA-CO/Gold instance segmentation任务上,强调DINO-X是zero-shot transfer物体归拢的全球SOTA。
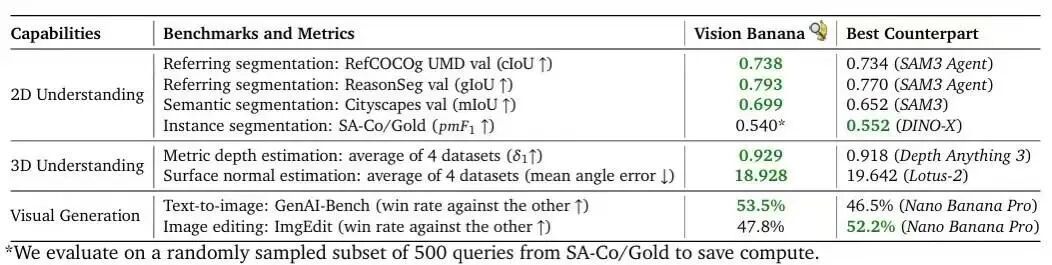
此外,DINO系列论文也世俗被Meta的SAM2/SAM3、阿里的Qwen系列、字节的Seed系列援用。这响应出视觉物体归拢基模门槛极高,依赖雄伟的视觉基座大模子预西宾才略。
自2023年以来,视启过去凭借Grounding-DINO与DINO-X系列,在灵通物体归拢榜单上保持了最长的畅达最初期间。
道理的是,DINO的真义是「恐龙」,恐龙亦然这个团队各式模子的象征。
他们还有一个基于视觉指示作念物体检测的模子T-Rex2 (ECCV 2024),即是恐龙眷属的霸王龙。
DINO系列贬责的中枢问题,正是Object-Centric寰球模子最需要的底层才略:让机器实在「看懂」寰球由哪些物体组成、它们在那儿、它们之间是什么关系。

视启过去的阶梯,更强调面向果然寰球交互的Object-Centric表征才略,即围绕「物体是什么、在那儿、怎样被援用、怎样与环境发生关系」诞生归拢建模才略。
在此基础上,视启过去不仅在2D物体检测与分割,3D物体归拢与语义归拢上诞生了显耀上风,也继续向3D动作归拢蔓延,变成了从看见物体,到归拢物体,再到归拢动作与物体交互的好意思满才略栈。

从这个道理上说,视启作念寰球模子并不是转型,而是在其原有期间基础上的趁势蔓延。
单个模子的生效还能归因于契机,那么畅达作念出Grounding DINO、DINO-X等这么的全球最初物体归拢视觉基座大模子,更多证实的是团队底层才略依然成型。
对一家作念基础模子的团队来说,这意味着它不仅会「作念模子」,更掌抓了数据组织、预西宾范式、才略迁徙和任务膨胀的系统规律,这恰正是基模西宾才略最有劝服力的体现。
这种才略依然运转在居品上体现。5月15日,视启过去鸠合百度智能云在2026全球东谈主工智能终局展上认真发布EgoTwin——全球最新的高质料Ego东谈主手3D对都引擎。

要是说视觉原生寰球模子是视启过去的历久期间阶梯,那么EgoTwin即是这条阶梯在具身智能数据层面的第一个居品化抓手。
EgoTwin直击行业最卡脖子的繁重——把东谈主手操作数据更正为机器东谈主能用的西宾数据,数据网罗效用是行业主流决策的3.75倍。
更紧迫的是,EgoTwin并不仅仅一个数据网罗用具:它一方面把东谈主类Ego操作视频更正为机器东谈主可学习的数据钞票,另一方面也为寰球模子提供Action-Aligned的西宾底座,成为「数据引擎—模子迭代—实践落地」闭环的第一步。

更大的愿景,张磊直言:寰球模子将成为物理寰球AI的中枢基础技艺。
在他看来,数字寰球中,大讲话模子正在承担肖似于OS(操作系统)的变装,底层是GPU算力,中间是大讲话模子,表层是各式种种的Agent。
这条路依然被充分考证,不管是Coding领域如故其他Agent花样,都依然解析走得通。
物理寰球里,相似的范式变化正在发生。只不外,物理寰球的基础技艺除了算力除外,还会加入机器东谈主实践。
在这一层之上,张磊领导的寰球模子团队正在买通Learning From Experience的范式,机器东谈主在学习历程中不错变得愈加自主、愈加高效,由此取得更强的物理任务技巧。
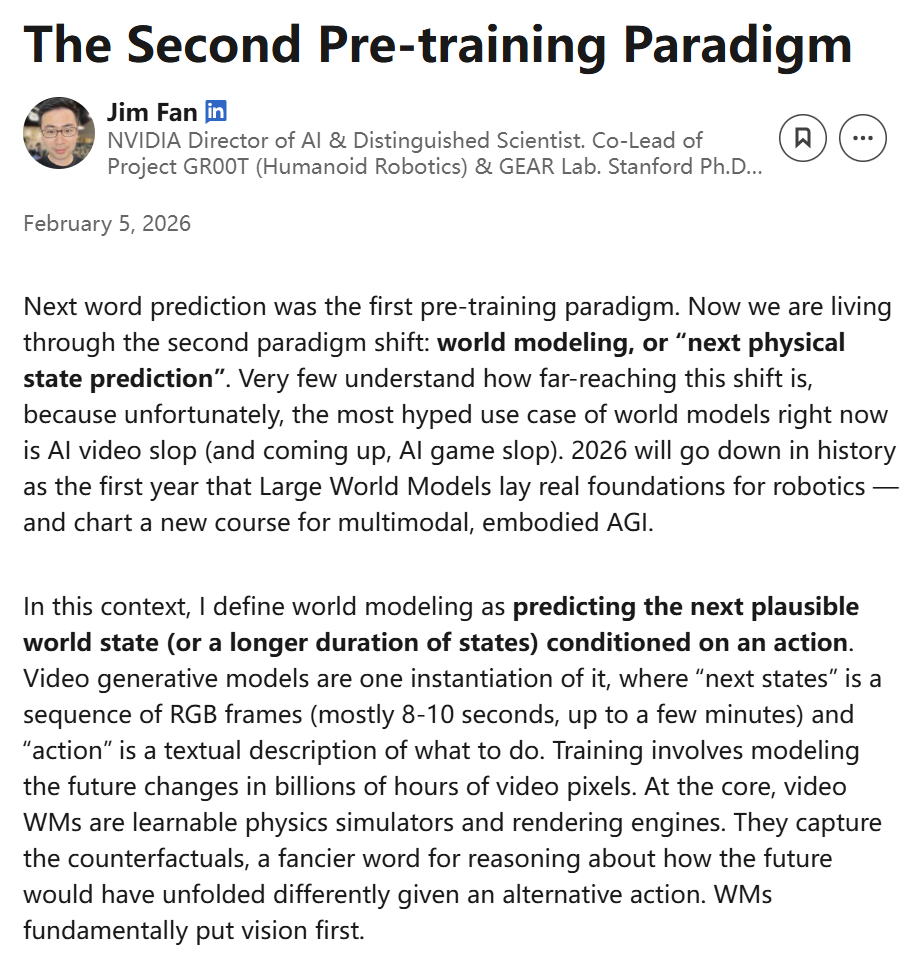
英伟达科学家Jim Fan年头说,下一个词瞻望是第一种预西宾范式,当今咱们正在资格第二次范式更正:下一个物理景色瞻望。
他预言,2026年将被载入汗青,成为寰球模子为机器东谈主期间奠定实在基础的第一年。
张磊缓助这个判断,同期强调少许:视觉,是物千里着冒昧能最主要的信息进口,亦然通向寰球模子的要津上风标的。
视启过去历久蕴蓄的检测、识别、分割、追踪、3D物体归拢,3D动作归拢与灵通寰球感知才略,不仅让机器更好地「看见」寰球,也为其进一步建模寰球、预演过去、复古举止提供了坚实基础。
寰球级主义,眩惑寰球级东谈主才
要作念寰球级的模子,起原得有寰球级的团队。
视启过去创举东谈主兼CEO张磊,是这支团队最紧迫的底色。
张磊博士,师承中国东谈主工智能奠基东谈主见钹院士,并曾历久在磋商机科学与东谈主工智能领域寰球级大家、好意思国国度工程院外籍院士沈向洋先生指引下责任。
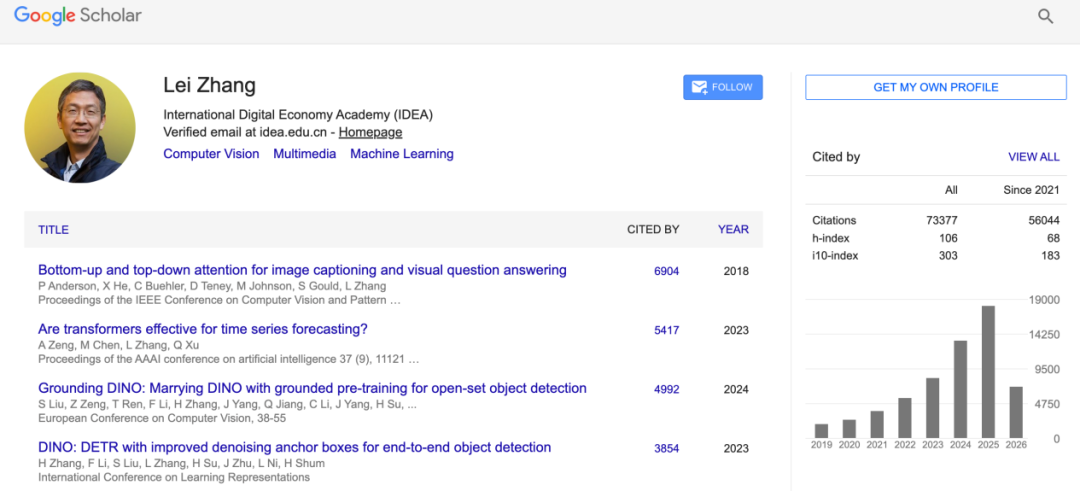
手脚 IEEE Fellow,他累计发表200余篇顶级会议和期刊论文,Google Scholar 总援用已超越7.3万次。
他曾在微软亚洲商议院、微软总部商议院及磋商机视觉关系居品部门任首席商议员,领导商议组从事磋商机视觉基础商议,过火在大鸿沟图像分析、物体检测、视觉讲话多模态归拢方面的应用,商议后果被世俗用于微软必应搜索及贯通做事云磋商平台。
值得一提的是,在张磊进行博士深造之前,是国内最早一批参与室内搬动机器东谈主商议的东谈主员之一。
绕了一个大圈,从机器东谈主到磋商机视觉,再从视觉回到机器东谈主,这条轨迹并非偶然,而是他对物理寰球AI判断的一贯逻辑在驱动。
2021年,张磊加入IDEA商议院,领导团队研发DINO-X视觉大模子,为机器赋予物体级归拢才略。
宝马会(BMW Club)官网app下载随后其孵化视启过去,将这套才略推向寰球模子赛谈。
视启过去还邀请了张钹院士、沈向洋院士担任科学照拂人。团队中枢成员主要来自清华大学、微软、腾讯等顶尖高校与国表里科技大厂。
据视启显现,团队中约50%具有清华配景,约20%领有智能驾驶关系训导,80%为90后后生东谈主才,100%具备国外或国内头部科技企业资格。
近期,视启在北京进一步眩惑了多位国内机器东谈主和强化学习标的的优秀年青算法东谈主才加入。
他们的主动秉承加入,自身即是一种投票——投的是视启活着界模子方朝上的期间判断,亦然他们对这支团队未必再创光泽的信心。

作念寰球模子很难,作念隐空间寰球模子更难。
也曾作念出寰球第一视觉大模子的视启团队,正把相似的信念,押注在隐空间寰球模子上。
张磊和他的视启过去,正走在将隐空间寰球模子贯彻到底、知难而上的路上。
一键三连「点赞」「转发」「注意心」
迎接在指摘区留住你的思法!
— 完 —
🌟 点亮星标 🌟
科技前沿发达逐日见2026世界杯赛事竞猜中国官网